



產品分類
- 電工電子電氣實訓設備
- 電力電子電機實訓裝置
- 過程控制實驗裝置
- 工業機器人智能制造
- 維修電工實訓設備
- PLC自動化實訓設備
- 數控機床實訓考核裝置
- 數控機床機械加工設備
- 機床電氣實訓裝置
- 機電一體化實訓設備
- 機械示教陳列柜
- 機械專業實驗設備
- 傳感器檢測實驗室設備
- 工業互聯人工智能實訓設備
- 特種作業操作實訓考核設備
- 物聯網實驗實訓設備
- 消防、給排水實訓設備
- 網絡布線實訓室設備
- 電梯安裝維修實訓考核設備
- 熱工暖通家電制冷實訓設備
- 樓宇智能化實訓設備
- 環境工程實驗裝置
- 流體力學實驗裝置
- 化工專業實驗實訓設備
- 新能源實驗實訓設備
- 電力供配電實訓設備
- 煤礦礦山實驗實訓設備
- 液壓氣動實驗室設備
- 教學仿真軟件
- 軌道交通實驗實訓設備
- 船舶實訓考核裝置
- 駕駛模擬訓練設備
- 新能源汽車實訓設備
- 汽車發動機底盤實訓臺
- 汽車電器電子實訓臺
- 特種車工程機械實訓設備
- 智能網聯汽車實訓設備
- 醫學教學模型
- 中小學實驗室設備
- 實驗箱.實驗儀
- 光電子通信實驗裝置
- 儀器設備.教學掛圖
更多新產品
- LGBX-AI02型人工智能應用技術實訓室
- LGBX-AQ07型網絡安全運維與攻防演練綜合實訓室
- LGBX-AQ06型網絡安全攻防演練實訓室
- LGBX-X02型網絡信息安全運維實訓室
- LGBX-SJ03型數據中心網絡工程綜合實訓室
- LGBX-WL06型網絡系統管理與運維實訓室
- LGBX-WL01型網絡綜合布線實訓室
- LGBX-DN01型計算機組裝與維修實訓室
- LGWL-CK01型智能倉儲應用實訓系統
- LGHG-YR02型液-液熱交換綜合實驗裝置
- LGHG-YB03C型化工儀表維修工實訓考核裝置
- LGWK-DH06型電工電子技術實驗平臺
- LGLY-ZN03型智能樓宇實訓室
- LGJD-Y05C型通用機電設備安裝與調試實訓裝備
- LGZN-SZ02L型智能制造數字孿生虛擬仿真實訓室
更多熱點產品
- 汽車透明整車模型、運輸車輛模型
- CLG-104型《電機與變壓器》示教陳列柜(CD解說)
- CLG-109《模具》示教陳列柜(CD解說)
- CLG-107型 機械綜合陳列柜
- CLG-102型 《機械零件》示教陳列柜
- LG-DCC型 機械振打袋式除塵實驗裝置
- LG-MFL01型 超濾微濾膜分離實驗裝置
- LG-NKS型 催化劑顆粒內擴散實驗裝置
- LG-CLDF型 多釜串聯實驗裝置
- LG-YY18C型 氣動與PLC實訓裝置(T型鋁槽單面)
- LG-YY18B型 透明液壓傳動與PLC實訓裝置(T型鋁槽單面
- LG-YYCS01型 液壓傳動與控制綜合測試實驗臺
- LG-DY01B型 電液比例綜合實驗臺
- LG-YYZN01型 智能型液壓綜合實驗臺
- LG-DLK01型 電力系統綜合自動化實驗平臺
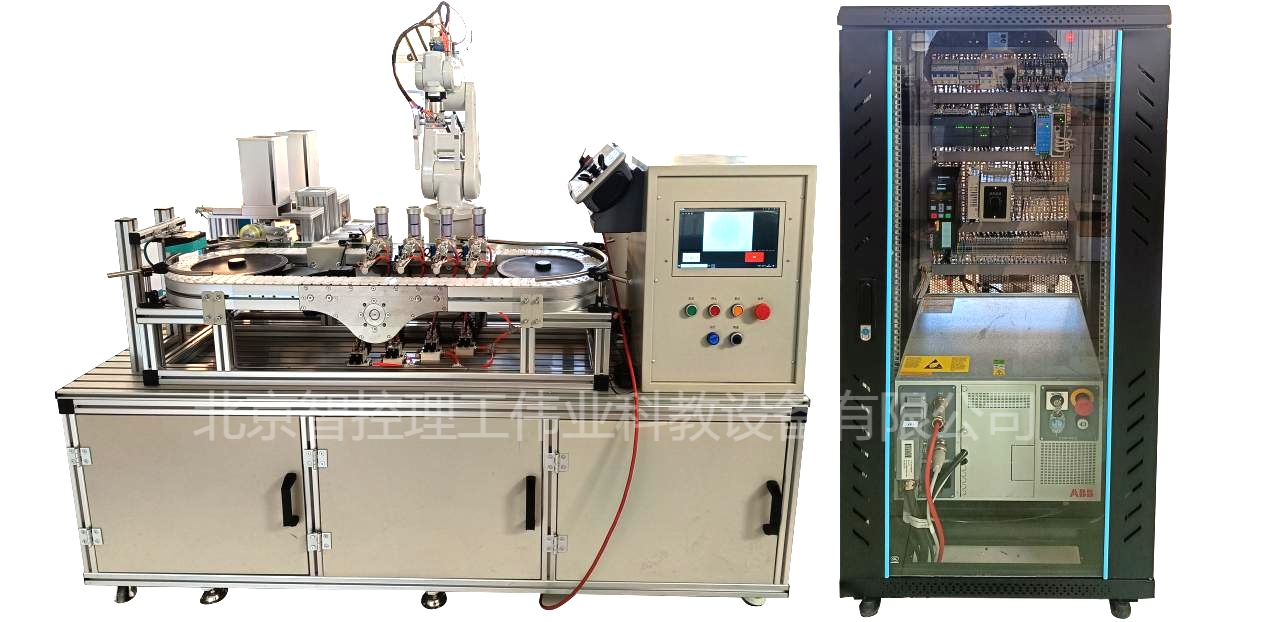
LGGY-S2型工業機器人與智能視覺系統應用實驗平臺
品牌:理工偉業 咨詢電話:010-82827827 82827835
一、系統與組成
平臺至少由六自由度工業機器人系統、智能視覺檢測系統、可編程控制器(PLC)系統、RFID數據傳輸系統、工具換裝單元、四工位供料單元、環形輸送單元、直線輸送單元、工件組裝單元、立體倉庫單元、廢品回收框、各類工件、電氣控制柜、型材實驗桌、型材電腦桌等組成,實現對高速傳輸的工件進行分揀、檢測、搬運、裝配、存儲等操作。
二、技術參數
1、輸入電源:三相四線AC380V±10% 50Hz
2、設備實驗平臺尺寸(長寬高):2000mm×1200mm×1500mm
3、設備控制柜尺寸(長寬高):600mm×600mm×1400mm
三、配置及參數
(一)工業機器人技術指標
1.埃夫特E3-600機器人本體

(1)串聯6關節且本體防護等級不小于IP40;
(2)重復定位精度:≤±0.02mm;
(3)工作半徑:不小于590mm;
(4)有效荷重:不小于3 kg;
(5)集成信號源與氣源:手腕設不少于10路信號及不少于4路空氣(5 bar);
(6)各軸運動范圍//速度:J1軸 ±170°/400°/sec;J2軸 +85°/-135°/300°/sec;J3軸+185°/-65°//520°/sec;J4軸±190°//500°/sec;J5軸±130°//530°/sec;J6軸±360°/840°/sec;
2.機器人控制系統
(1)控制系統具有8路數字量輸入(3個捕捉功能)PNP,24VDC光電耦合;8路數字量光電耦合輸出(每一路最大輸出電流為0.5A)PNP,24VDC;1路增量式編碼器輸入;
(2)控制系統支持最多32軸插補,通過現場總線CANOPEN或者ETHERCAT進行驅動;
(3)通信模塊擴展:不少于2個通信模塊,支持I/O等模塊擴展;
(4)通信端口類型:不少于2個以太網,支持Modbus/TCP,Profibus DP(從站)。
(二)智能視覺檢測系統
智能視覺檢測系統由視覺控制器、視覺相機及監視顯示器等組成,可隨機器人移動(視覺工裝),用于檢測工件的特性,如數字、顏色、形狀等,還可以對裝配效果進行實時檢測操作。智能視覺檢測系統通過I/O電纜連接到PLC或機器人控制器,也支持串行總線和以太網總線連接到PLC或機器人控制器,對檢測結果和檢測數據進行傳輸。
1、控制器主要規格要求:
(1)動作模式:支持標準模式,倍速多通道輸入、不間斷調整;
(2)支持并列處理;
(3)單臺控制器最多可連接2臺相機
(4)場景數:128
(5)UI操作:支持鼠標
(6)設定方法:利用流程編輯功能制作處理流程
2、相機參數要求:
(1)攝像元件所有像素讀出方式、行間傳輸型、CCD攝像元件(相當于1/3英寸)
(2)彩色/黑白:彩色
(3)有效像素數:640(H)×480(V)
(3)攝像面積 H×V(對角):4.8×3.6(6.0mm)
(4)像素尺寸:7.4(μm)×7.4(μm)
(5)快門功能:電子快門方式可在20μs~100ms的范圍內設定快門速度
3、視覺軟件功能要求:
(1)真彩處理可將像素間的色差準確地換算成色差值導出。該值將作為RGB三維空間上的距離差被感知,即便是微小的色差也能準確檢測到。因此,即使對比度較低,也能可靠地檢測到劃痕及污跡等。
(2)可使用傳送帶全景畫顯示工具,輕松確認最佳的測量觸發輸入間隔。可預防工件的漏檢測。
(3)以圖像傳感器測量基礎為結果,模擬機械東西。
(三)RFID數據傳輸系統
1、RFID檢測系統,安裝在環線輸送單元的左端圓弧處,電子標簽已埋在工件內部。當工件從環線輸送單元經過左端圓弧處時,RFID檢測系統可以準確地讀取工件內的標簽信息,如編號、顏色、高度等信息,該信息通過工業現場數據總線傳輸給PLC,用來實現工件的分揀操作。
2、工作頻率要求:13.56MHz;
3、無線協議:ISO-15693;
4、讀寫距離要求:0-150mm;
5、通信方式:以太網;
6、供電方式:POE供電。
(四)可編程控制器單元
配備西門子S7-1200系列可編程控制器、數字量擴展模塊,用于讀寫RFID系統的工件數據,控制機器人、電機、氣缸等執行機構動作,處理各單元檢測信號,管理工作流程、數據傳輸等任務。PLC主機:CPU 1214C,數字量輸入模塊:SM1221,模擬量輸出模塊:SM1222
(五)工具換裝單元
1、由大口氣夾、真空發生器、吸盤工裝、視覺工裝、定位工裝、工裝支架等機構組成。大口氣夾、真空發生器安裝機器人本體上,受機器人控制,大口氣夾不僅可以夾取工件,還可以夾取三種工裝進行功能性操作。大口氣夾一側前端裝有光纖傳感器,用于檢測前方有無物體,另一側裝有氣動對接裝置,用于將氣動信號自動導入到氣動工裝(吸盤工裝)上。工裝支架安裝在型材實驗桌上,用于機器人自動放置和取用不同的工裝。
2、提供多種工裝:吸盤、視覺、定位等。
3、吸盤工裝上裝有真空吸盤和氣動對接裝置,當大口氣夾夾取吸盤工裝時,真空吸盤的動作由機器人控制,可以隨之移動,吸取任意可到達位置內的工件。
4、視覺工裝上裝有視覺相機,當機器人夾取視覺工裝時,視覺相機可以隨著機器人的移動拍攝不同位置、不同方向的工件或場景。
5、定位工裝上設有定位針,用于精確定位工件的位置。
(六)四工位供料單元
由井式料庫、推料氣缸、頂料氣缸和光電傳感器組成,安裝在型材實驗桌上,用于將工件庫中的工件依次推出到環形輸送線。提供不同編號、不同高度、不同顏色的標準工件,以及編號缺少筆畫、雜色疊加等不合格工件。四工位的供料設計,使得供料方式多樣化,可以進行單一的上料,也可以進行不同編號、高度、顏色的組合上料,以及對上料速度快慢控制,實現上料形式的多樣化。
(七)環形輸送單元
包含一套交流調速系統,由變頻器、三相交流電機、環形板鏈(傳送帶)、對射傳感器等組成,安裝在型材實驗桌上,用于傳輸工件。要求環形輸送單元包含一套,交流調速系統,由V20 0.55KW變頻器、三相交流電機、環形板鏈(傳送帶)、對射傳感器等組成,安裝在型材實訓桌上,用于傳輸工件.
(八)直線輸送單元
包含一套直流調速系統,由直流電機、高精度編碼器、調速控制器、同步帶輪等組成,安裝在型材實驗桌上,用于傳輸工件。
(九)工件組裝單元
由工件盒送料機構及工件蓋送料機構組成,安裝在型材實驗桌上,用于裝配工件。具有3個工件盒組裝位置,能同時對3個工件盒進行裝配操作。工件盒內設有4個工件槽用于放置工件,工件盒和工件蓋四個角帶有磁性粘合,可以使工件盒與工件蓋緊密組合在一起。設有多個傳感器,可以檢測工件盒/工件蓋的有無、方向是否裝反。機器人可以進行工件盒/工件蓋裝反時的修正、工件按序裝配、工件拆解等操作。通過對工件盒/工件蓋的正反放置,工件裝配的順序變化,提高機器人的應用靈活性,可進行機器人不同難易程度的應用考察,實現實驗及考核的多樣化。
(十)立體倉庫單元
由鋁質材料加工而成,配有9個倉位(3×3),安裝在型材實驗桌上,用于放置裝配完的組件,也可以通過機器人對裝配完成的組件進行拆裝,并分類放置到相應的工件料庫。
(十一)廢品回收框
安裝在型材實驗桌左后側,用于機器人自動放置被檢測出來的無用工件或不合格品。
(十二)電氣控制柜
用于安裝機器人控制器、PLC、變頻器及調速控制器等電氣部件,采用網孔板的結構,便于拆裝。通過兩根電纜線與型材實驗桌相連,兩端使用航空插頭,強弱電分離,連接安全可靠。
(十三)以太網路由器
以太網路由器將PLC、機器人控制器、智能視覺控制器組成一個以太網局域網,進行數據的相互傳輸,實現工業現場控制系統的高層次應用,同時可以培養和考核學生對工業網絡的使用技能。
(十四)云智能實驗室安全管理系統
系統由主電路、控制電路、檢測保護電路、顯示電路、云平臺數據收發器、云平臺智能管理網站、云組態軟件、大數據云平臺記錄等組成,實現無線傳輸、信息處理等物聯網技術應用于自動化遠程控制。設備端運行狀態、數據參數等上傳至云平臺。
四、配套軟件課件
(一)西門子博圖V17 PLC編程軟件一套。
(二)電氣控制技能實訓仿真軟件
(三)PLC控制編程仿真軟件
(四)工業自動化控制實訓系統
(五)教學課件資源
1、PLC編程教學課件資源
2、電氣控制技能實訓仿真軟件
3、電氣教學課件資源
五、配置清單
|
序號
|
名 稱
|
主要部件、器件及規格
|
數量
|
備注
|
|
1
|
電氣實訓柜
|
600mm×600mm×1500mm
|
1臺
|
|
|
2
|
實訓平臺
|
2000mm×1200mm×1400mm
|
1臺
|
|
|
3
|
工業機器人
|
E3-600機器人、控制器、示教器
|
1臺
|
埃夫特
|
|
4
|
智能視覺系統
|
工業相機 MV-CS016-10GC
|
1臺
|
海康
|
|
工業鏡頭MVL-HF1228M-6MPE
|
1臺
|
|||
|
視覺光源MV-LCDS-50-50-W
|
1臺
|
|||
|
視覺軟件IMVS-VM-6100-PR0
|
1套
|
|||
|
電纜MV-ACC-01-1102-3m
|
1臺
|
|||
|
監視顯示器
|
1臺
|
|||
|
5
|
RFID系統
|
讀寫器:DW207
|
1套
|
|
|
電子標簽
|
36個
|
|||
|
6
|
可編程控制器系統
|
CPU 1214C DC/DC/DC
|
1只
|
西門子
|
|
數字量輸入模塊:SM1221
|
1只
|
|||
|
模擬量輸出模塊:SM1222
|
1只
|
|||
|
7
|
交流調速系統
|
變頻器:V20 0.55
|
1套
|
|
|
交流減速電機:01K3GN-D/0GN50K
|
||||
|
8
|
直流調速系統
|
PID調節控制器:24/20BL-4Q02
|
1套
|
|
|
直流電機:DM-06-2GN-24
|
||||
|
編碼器:增量式2000線
|
||||
|
10
|
路由器
|
4P以太網路由器
|
1臺
|
|
|
11
|
實訓模塊
|
四工位供料單元、環形輸送單元、直線輸送單元、工件組裝單元、工具換裝單元、立體倉庫單元等
|
1套
|
|
|
12
|
氣泵
|
靜音氣泵
|
1臺
|
|
六、實訓項目
項目一 PLC程序編程與調試
項目二 工業機器人示教單元使用
項目三 工業機器人軟件使用
項目四 工業機器人基本指令操作
項目五 工業機器人工件的跟蹤抓取
項目六 射頻識別(RFID)技術應用
項目七 使用RFID軟件讀寫電子標簽
項目八 PLC對RFID的數據讀取操作
項目九 PLC對RFID的數據寫入操作
項目十 智能視覺系統應用
項目十一 智能視覺編號比對測量
項目十二 智能視覺顏色比對測量
項目十三 智能視覺角度比對測量
項目十四 智能視覺角度比對測量
項目十五 智能視覺表達式及輸出結果
項目十六 工業機器人與智能視覺系統綜合應用